Research
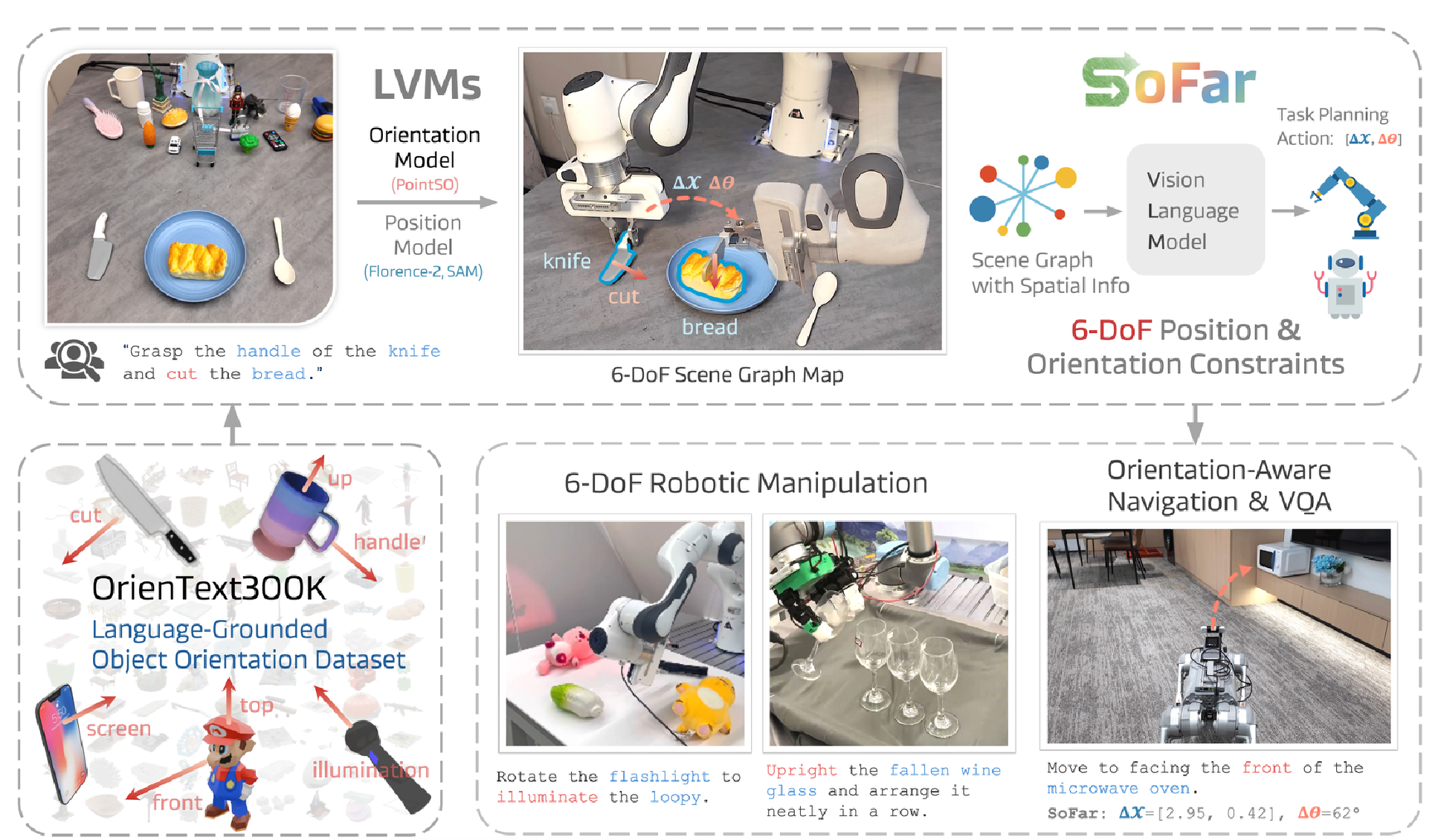
SoFar: Language-Grounded Orientation Bridges Spatial Reasoning and Object Manipulation
NeurIPS 2025
Spotlight
We introduce semantic orientation and propose a multi-modal model that facilitates spatial understanding in robot manipulation.
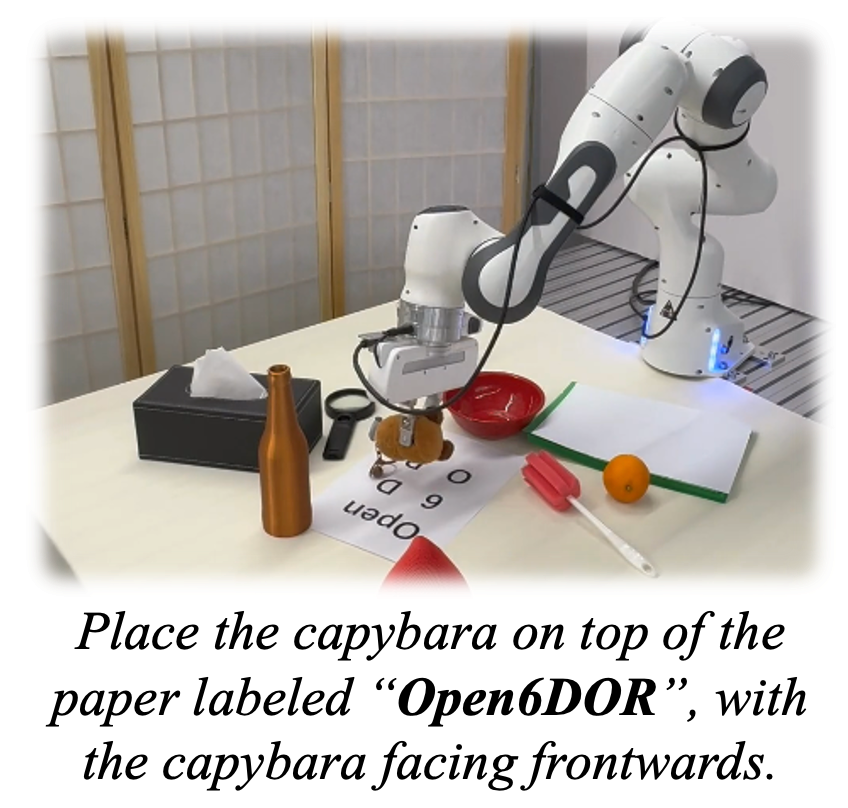
Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach
IROS 2024
Oral Presentation
CVPR 2024 @ VLADA
Oral Presentation
ICRA 2024 @ 3D Manipulation
Spotlight
We present Open6DOR, a benchmark and zero-shot method for open-instruction 6-DoF object rearrangement, integrating 3D awareness to enable complex manipulation.
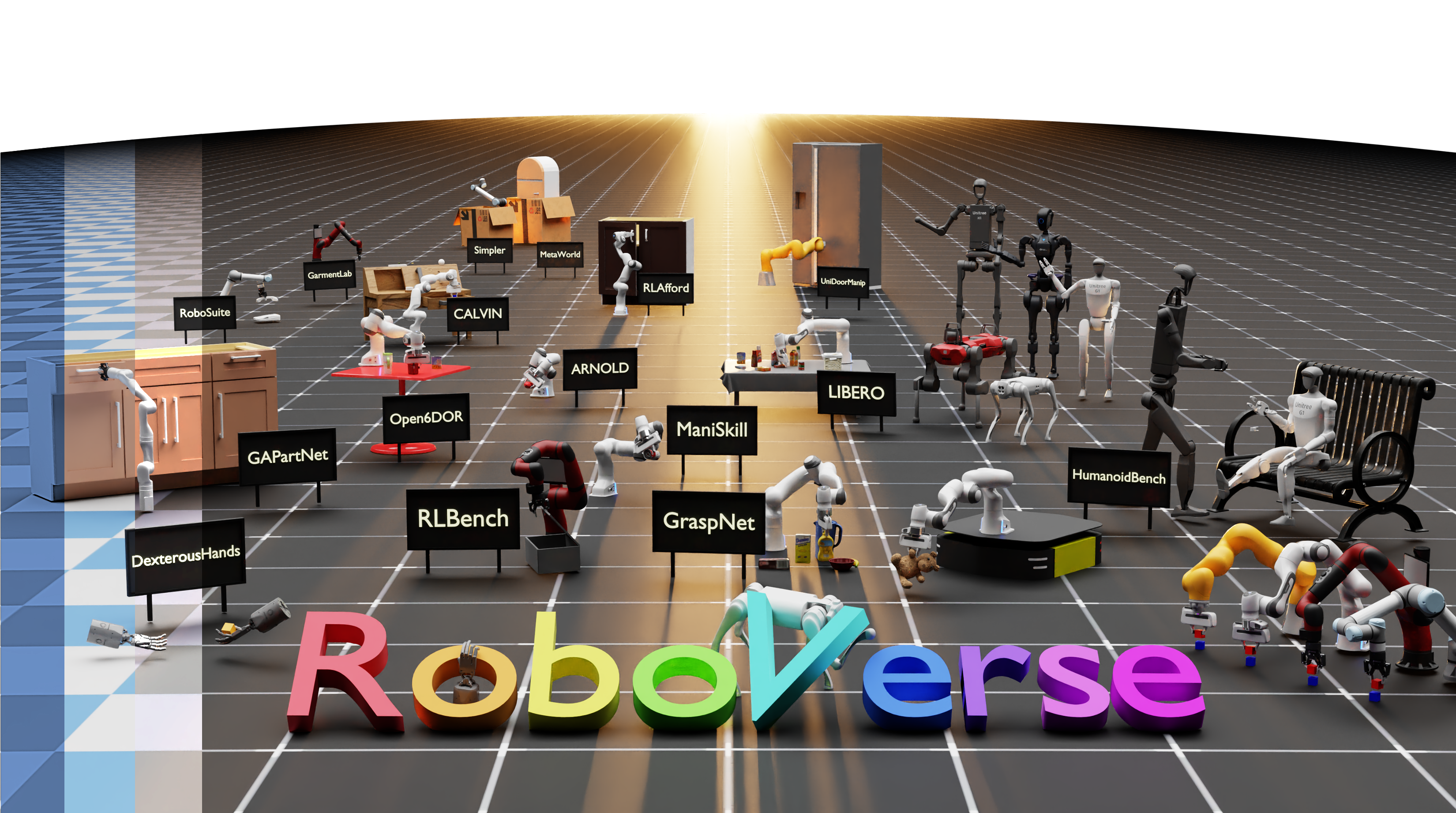
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
RoboVerse Team
RSS 2025
We propose RoboVerse, a comprehensive framework for advancing robotics through a simulation platform, synthetic dataset, and unified benchmarks.
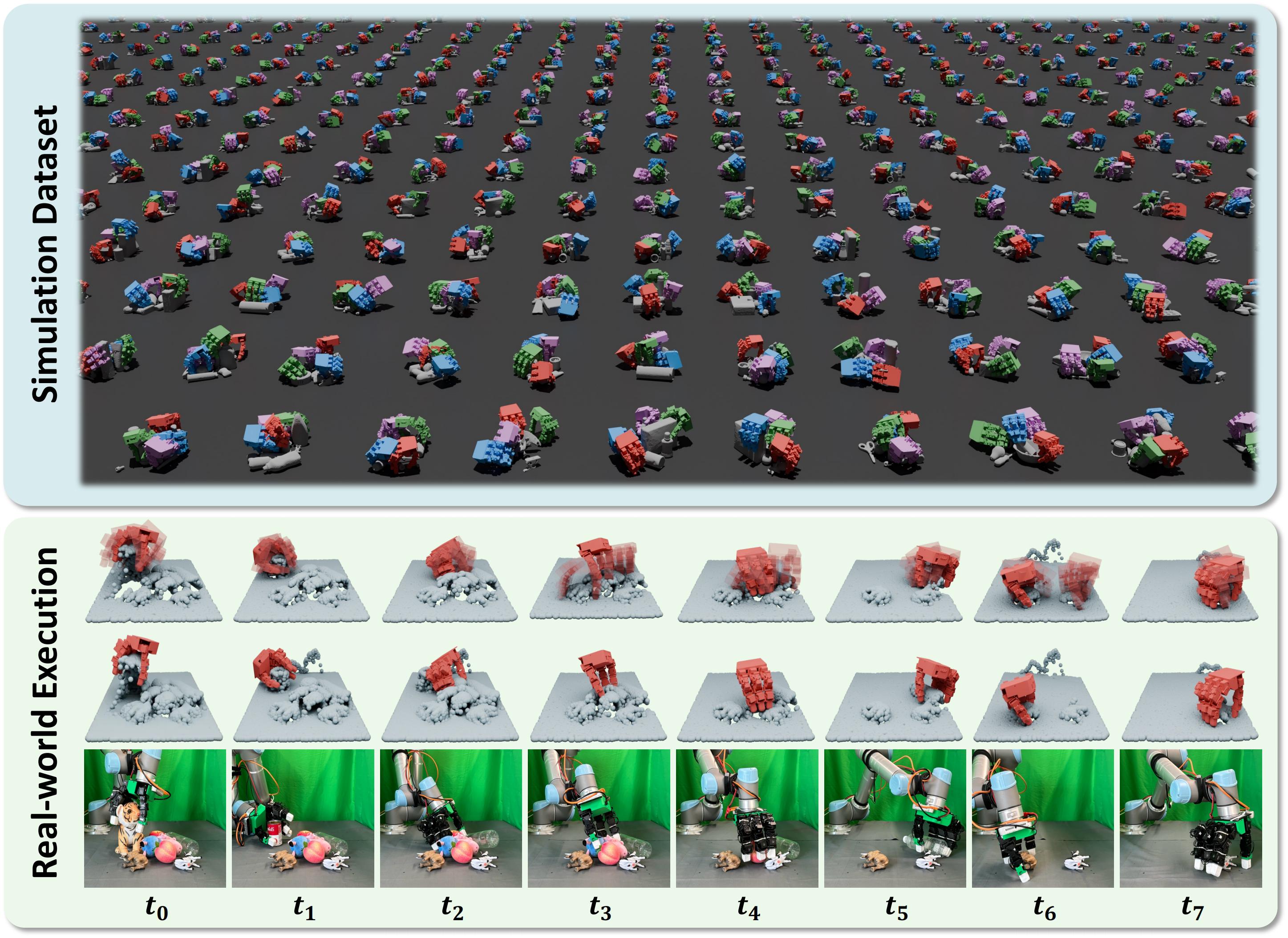
DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes
CoRL 2024
We synthesized a large-scale dexterous grasping dataset in cluttered scenes and designed a generative framework to learn grasping in the real world.
Simulately: Handy information and resources for physics simulators for robot learning research.
Open-source Project · Selected into CMU 16-831t
We build an open platform that gathers comprehensive information of robotics and physics simulators for cutting-edge robot learning research.
|